

 |
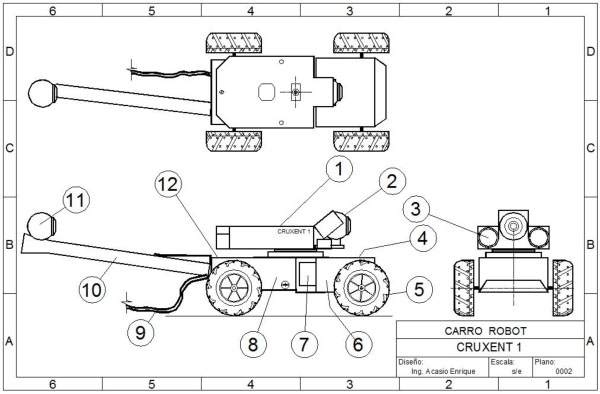
Figura 1. Arquitectura
Básica de Robot teleoperado “Cruxent 1”. |
Las llantas fueron moldeadas en goma de silicón
inyectadas directamente en un molde de yeso, con el diseño de surcos y tacos
muy característicos de las ruedas tractoras para un mejor desempeño y agarre en
terreno irregular. Ver figura 2.
El chasis del robot esta hecho de lámina de acero
galvanizado, constituido por dos cuerpos articulados, permitiendo así el cambio
de dirección. El cuerpo articulado posterior, de mayores proporciones contiene
en su parte superior la torreta giratoria de exploración y registro con un
rango de giro de 360° para evaluar con exactitud las condiciones del entorno. Permitiendo capturar panorámicas horizontales
en 360° tanto en sentido de giro horario como anti horario. Movimiento que es
logrado mediante un motor eléctrico y un sistema de corona y piñón como
elemento reductor. Ambos cuerpos articulados poseen portezuelas para permitir
el acceso al interior del chasis para reparaciones o mantenimiento al sistema
eléctrico y mecánico. Los cuerpos articulados, el apéndice posterior y la torreta de exploración fueron
pintados de un amarrillo intenso como referencia para ser distinguido con mayor
claridad en el interior de las cuevas, así como también de aumentar la
posibilidad de identificar y recuperar mediante otro carro robot ante una
posible pérdida, como se muestra
en la figura 3.
 |
Figura 2. Imágenes del moldeado de las llantas a)inyección de
Silicon a molde de yeso.
b)secado de la llanta c)destrucción de molde para extracción de rueda d)instalación de ruedas tractoras al chasis del carro. |
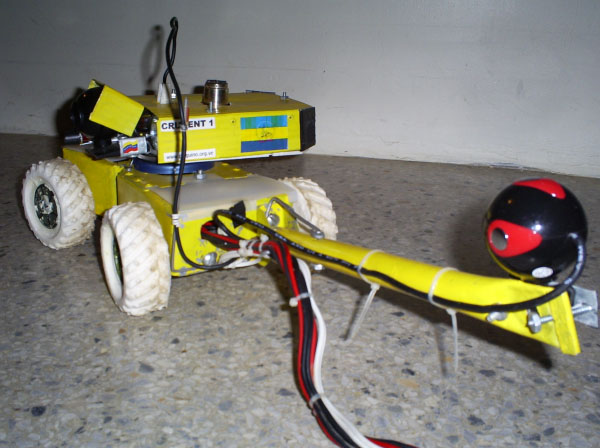 |
Figura 3. Prototipo Robot
teleoperado “Cruxent 1”.
|
El movimiento del robot se consigue
mediante 3 motores eléctricos de reducidas dimensiones y gran torque, uno para
tracción en las ruedas traseras, y dos para tracción en las ruedas delanteras y
dirección, confiriéndole al robot las formas básicas de avance; ir hacia
adelante, reversa, girar a la izquierda y a la derecha. Un robot móvil
normalmente tiene 3 grados de libertad respecto a una referencia: posición en
el plano (X, Y) y orientación (Q), independientemente de donde inicie, el robot
debe poder moverse a cualquier posición y orientación (X,Y,Q). El Cruxent 1 en
un terreno plano puede moverse en su entorno a una velocidad de 0,25 m/s.
3.- PRUEBAS Y RESULTADOS
La segunda prueba del Cruxent 1 fue establecida para verificar la fuerza de arrastre de su cordón umbilical en todo el terreno, maniobrando el carro en círculos y en figuras en forma de ocho, logrando incluso pruebas de regreso en trayectoria y pisando o traspasando por encima de su propio cordón. También se realizaron pruebas de reversa y pruebas de las luces halógenas. El tiempo empleado para las pruebas: 1 hora, y al igual que la primera prueba solo se recurrió a la navegación mediante las imágenes enviadas en tiempo real por el propio robot.
La tercera prueba fue una prueba de
campo, en donde se desplazó el carro robot en planos inclinados, en terreno
arenoso y pedregoso, e incluso en charcas de agua para estudiar y mejorar su
desempeño. Las pruebas fueron totalmente satisfactorias, el robot estaba listo
para su primera salida de campo.
 |
|
 |
 |
Vista torreta |
Vista general |
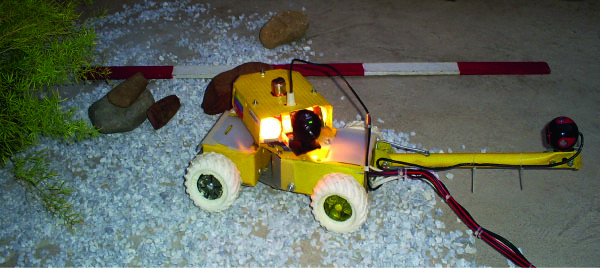
Figura 4. Primeras pruebas
de teleoperación y registro del “Cruxent 1”. |
|
 |
 |
| Figura 5. Vista panoramica de La Peña Manaure y vista de planta mediante imagen satelital de Google Earth. |
Desde
el lugar de estadía hasta La Peña Manaure, en donde se encuentra la cueva, hay una distancia de camino
de 3 Km, recorrido realizado a pie con la caja contenedora y todos los demás
equipos de la campaña. Una vez cerca del lugar, correspondió subir pendientes
pronunciadas, tal y como lo muestra la figura 6, para finalmente escalar una
pared casi vertical de unos 30
metros hasta alcanzar la cima. El ascenso de la orografía fue realizado en su
costado este.
 |
Figura 6. Traslado del Carro robot en caja
contenedora hacia el lugar de estudio por el autor.
|
Una vez en el sitio de estudio, se desempacó el carro
robot y se le realizó un chequeo de operatividad; pruebas de luces, giro de
torreta de observación, tracción y dirección. Todo funcionó perfectamente. El
prototipo habia soportado el mal trato del transporte, y de la subida hacia la
cima de la orografia en donde se encontraba la oquedad rocosa. Se procedio a
encender el computador portatil y conectar el sistema de registro, la camara principal de la torreta de
observación remitía su señal muy clara. Se activaron los programas de grabación
de video. El robot fue introducido en una pequeña abertura de apenas 30 x 25
cms, tal y como lo muestra la figura 7 y luego posado en el piso de la cueva mediante izamiento, debido a
que entre la abertura y el piso existia una altura de 2,20 metros.
Una vez en el piso de la camara natural, se procedio a
realizar barridos con la torreta de observación para establecer una exploración
previa del entorno, antes de definir una ruta de desplazamiento ideal, mostrado
en la figura 8. Una vez reconocido el entorno se envió al cruxent 1 al centro
de la camara para dar inicio y realizar de modo sistemático el registro del
interior de la misma, tanto en video como en imágenes. La torreta giratoria
logró captar una panoramica horizontal en 360°, iniciando su giro y tomando
como referencia el apendice posterior del carro, siendo la referencia 0°, luego
en sentido horario, es decir de izquierda a derecha siguiendo la técnica
empleada por miguel Angel pereira en el estudio de cuevas, se realizó la
exploración de la cueva desde la pared izquierda, luego hacia el fondo para
continuar con la pared derecha y finalizar nuevamente en el apendice posterior
del cruxent 1, cuando ambas camaras de exploración se miran una a la otra
indicando completado los 360° de giro, requiriendo para ello 4 fotografias por
cada cuadrante de 90°, mostrando el interior de la cavidad rocosa con un total
de 16 imágenes. Estas imágenes fueron tratadas luego en un computador y mediante el metodo de
teselación se logró
 |
Figura 7(a). Introducción a
la cueva.
|
 |
Figura 7(b). Carro robot en
espera de iniciar el proceso de registro.
|
 |
Figura 8. Carro robot
explorando el interior de la cámara. |
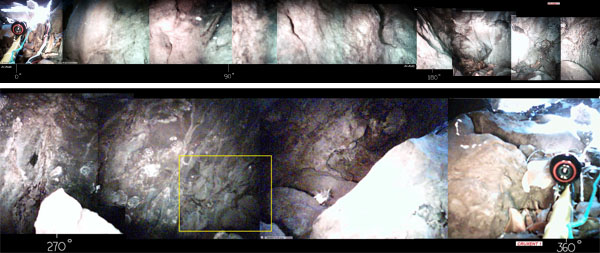 |
Figura 9. Mapa georeferenciado 2D del Interior de la cueva y localización de pintura parietal. |
Puede apreciarse en la figura 10 un par de dibujos
representativos del sistema natural estudiado por el robot en una vista
seccional y una vista de planta. Ambos estan representados en forma
simplificada, en ninguna de ellas se respetan las escalas. A pocos metros de la
pequeña abertura, se encontró otra entrada de mayores proporciones, tapiada con
gran cantidad de hojas secas, raizes y tierra. Se limpió y permitio apreciar el
diseño de un tunel comunicante hacia la camara, una delicia para los estudiosos
de la espeleologia. De seguro pudo ser el acceso de entrada a la camara para
los antiguos moradores del lugar. Una gatera, o paso reducido en donde solo es
posible entrar a la galeria reptando. Al introducirse en ella e inspeccionar
con linterna en mano, se podia apreciar en el fondo del tunel al carro robots en el centro de la cámara. Por
seguridad, solo se realizó una exploración rapida sin intentar entrar al
interior del tunel, el olor de guano de murcielago era bastante fuerte, ademas,
el pasaje era muy estrecho.
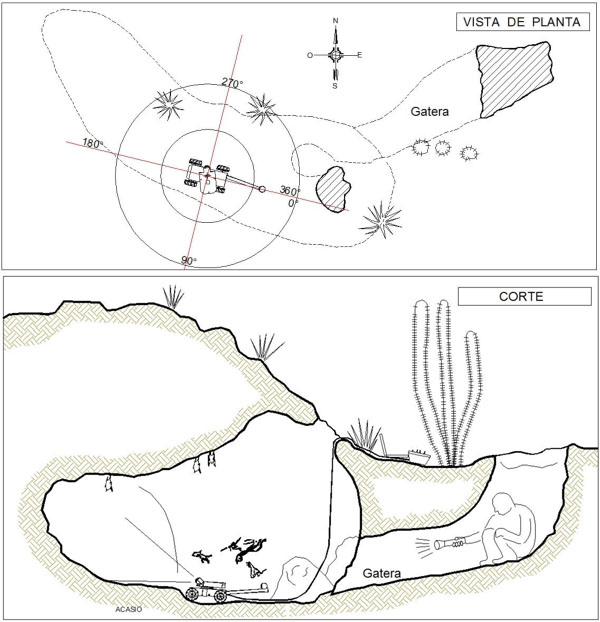 |
Figura 10. Vistas de planta y sección de la cueva explorada y registrada por el
Cruxent 1.
|
De la exploración realizada a la cámara, se pudo
apreciar una serie de pinturas parietales en negro localizadas en la pared
derecha, siendo esta la pared norte de la oquedad, mostrada en la figura 11. Se está en presencia de un hallazgo
antropologico realizado mediante el uso de un Robot teleoperado, una manifestacion rupestre e indicio de que
alguna vez dicha cámara fue utilizada por antiguos moradores del lugar. Se aprecia
pintura con diferentes calibres de trazo, desde líneas delgadas hasta grandes areas
planas en donde posiblemente utilizaron diferentes instrumentos. El robot
Cruxent 1 registra por primera vez arte parietal en la cueva, nunca antes se
supo de estas pinturas en la pared
por los lugareños de la zona. Siendo asi imágenes ineditas. Se sabía de la
existencia de la cueva, más se desconocia por la inaccesibilidad propio de la
zona su valioso contenido.
 |
Figura 11(a). Distribución
de las figuras en el panel norte de la cueva “La Peña Manaure”
|
 |
Figura 11(b). Vectorización
mediante CAD de pictografias encontradas en la cueva.
|
La figura mas grande contenida en
el interior de la cueva aparenta un diseño zoomorfo, un posible ciervo de
cuerpo alargado con sus cuatro extremidades bien moldeadas, representado en
actitud dinamica, con las extremidades posteriores flexionadas hacia atrás, y las delanteras de proporción exagerada en
comparacion con las posteriores, hacia adelante con sus tipicos dedos hendidos.
Del cuello alargado se proyectan dos astas muy largas.
Debajo de dicha figura se
encuentra otra forma zoomorfa muy peculiar, un animal con el cuello estirado
hacia arriba y sus extremidades o patas muy notorias, ademas de una cola.
Presenta manchas punteadas en el cuerpo, denotando posiblemente la figuración
de un jaguar tal y como lo muestra la figura 12 en una fotografia retocada en
verde mediante la aplicación Gimp y un dibujo realizado mediante CAD.
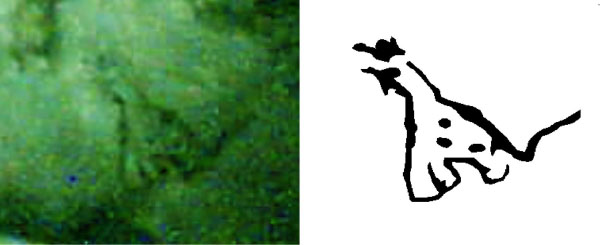 |
Figura 12. Motivo de una figura antropomorfa, se puede
apreciar el cuello alargado,
las extremidades y la cola, posiblemente un jaguar dadas las pintas en la piel. Al lado derecho una representacion en vectorizado mediante CAD (Dibujo Asistido por Computadoras). |
El resto de las pictografias contenidas
en la pared norte del interior de la camara captada por el Cruxent 1 representan formas abstractas,
contabilizandose un total de cuatro.
5.- CONCLUSIONES
Se
ha descrito una campaña realizada en una cueva ubicada en el eje de la sierra
de Coro, específicamente en la Peña Manaure, localizada en el Estado Falcón,
Venezuela logrando el hallazgo de manifestación
rupestre en el interior de la misma.
Los
mandos enviados al carro fueron ejecutados en tiempo real, lo que muestra la
eficiencia en la comunicación, procesamiento de información y sincronización en
los procesos. En todo momento se mantuvo una interacción entre el panel de
control y el Cruxent 1.
La
torreta de exploración y registro operó correctamente, a la vez que logro
obtener imágenes y video del interior de la oquedad en estudio, mostrando una
cámara abovedada que se aprecia bastante estable.
Por
primera vez en la historia de la arqueología Venezolana, y posiblemente tercera
en el mundo se utilizó un pequeño carro robots equipado con cámaras de video
para inspeccionar posibles alberges de nuestros antiguos originarios.
El
escáner también será utilizada para registrar modelos tridimensionales de
material arqueológico como: vasijas, piezas líticas, hachas que puedan estar
presentes en el interior de las cuevas a estudiar.
![]()
—¿Preguntas, comentarios? escriba a: rupestreweb@yahoogroups.com—
Cómo citar este artículo:
de manifestación rupestre en el interior de oquedades rocosas.
En Rupestreweb, http://www.rupestreweb.info/carrorobot.html
2014
REFERENCIAS
ACASIO, ENRIQUE. Piedras Parlantes de Siraba. Acasio Infografic, C.A. 2013.
ACASIO, ENRIQUE. Ensayo de Realidad Virtual. Acasio Infografic, C.A. 2004.
BONILLA, Y. VALERO, J. SANDOVAL, C. “Desarrollo de un Carro-Robot Teledirigido para la manipulación de Objetos” en 5TO Congreso Iberoamericano de Estudiantes de Ingeniería Eléctrica (V CIBELEC 2012)
CHIRINOS, CH. “Robótica aplicada a la arqueología” en Arte rupestre a flor de roca. Huellas Ancestrales. Artículo publicado en Ultimas Noticias. 14 de julio de 2013, pp .12-13.
KHAMIS, A. “Interacción remota con robots Móviles basada en internet” en Tesis doctoral, Departamento de Ingeniería de Sistemas y Automática. Universidad Carlos III de Madrid. España.2003.
PEREZ, J. TOVAR, A. UBALDO, V. “Robot Móvil de Tracción Diferencial con Plataforma de Control Modular para Investigación y Desarrollo Ágil de Proyectos” en 10º Congreso Nacional de Mecatrónica. Noviembre 3 y 4, 2011. Puerto Vallarta, Jalisco.
REYES, F. CID, J. MENDEZ, J. VILLEGAZ, G. “Diseño, modelado y construcción de un robot móvil.” en 2do Congreso Nacional de Electrónica, 24, 25 ,26 DE SEPTIEMBRE DE 2002
ROLLAND, C. “Descenso de Barrancos / Puenting.” EdimatLibros. 1999. Madrid. España.
VILLA, M. GUTIERREZ, J. PORTA, M “Vehículo robótico: autónomo y teleoperado con una PDA” en Ingeniería mecánica Tecnología y desarrollo. Vol.3. N°2. Marzo 2009, pp. 46-54.
UNIVERSIA “Robot explora túneles ocultos en Teotihuacán” en Universia, red de Universidades. Robótica. Septiembre 2010.
ESPINOZA, J. “Hardware y Software Libres, para una Sociedad Libre” en Talleres de Hardware Libre y Robótica Didáctica. UNEFM. Coro.25, 26, 27 y 28 de Febrerol 2013.